{kind=link}
INSTRUCCIONES DEL JUEGO
Se parte de la idea de combinar la tecnología maker y la gamificación para motivar a los alumnos a que realicen una tarea imprescindible pero tradicionalmente aburrida: el dictado. Así pues, con el objetivo de «ludificar» los dictados, se propone la realización de un dictado memorístico, que llamaremos el Dictadito inglés, arbitrado por el Escondibot, un prototipo mecatrónico que vamos a crear previamente (Imagen 1). Quien conozca el juego popular «el escondite inglés» (también llamado «el pollito inglés«) entenderá rápidamente la dinámica de este juego. Para quienes lo desconozcan, la detallo a continuación.

El profesor colgará hojas con un texto en diferentes puntos de las cuatro paredes de la clase y pondrá al Escondibot a contar, para lo cual le tapará los ojos con su párpado gigante. En ese momento, los alumnos deberán apresurarse a transcribir literalmente en sus libretas -situadas en sus respectivos pupitres- alguno de los textos colgados en las paredes del aula. Tendrán que darse prisa, pues cuando Escondibot termine de contar… Sonará una señal acústica indicando que todo el mundo debe dejar de escribir. Ganará quien más fielmente haya reproducido el texto en su libreta, sin faltas de ortografía ni de acentuación, sin palabras perdidas, sin letras olvidadas, etc.
Respecto a las instrucciones que dar a los alumnos, es fácil: «Debéis reproducir fielmente en vuestras libretas uno de los textos colgados en la pared; vuestras libretas deben permanecer en vuestras mesas y no podéis descolgar los papeles. Cuando Escondibot haga la señal, nadie podrá seguir escribiendo. Gana quien más -y mejor- haya escrito«.
Una variante de este juego sería hacerlo por equipos. Se divide a los alumnos en grupos de cuatro o cinco alumnos y se les sitúa formando una cadena entre el texto de la pared y la mesa de uno de los miembros del equipo. En este caso, deben transmitirse la información como en el juego del teléfono loco. Nuevamente, gana el equipo que menos incorrecciones tenga en el texto escrito, con la salvedad de que, en esta versión, si uno de los equipos termina antes, puede acercarse a Escondibot y abrirle los ojos para que los demás equipos deban dejar de escribir.
DISEÑO DEL PROTOTIPO MECATRÓNICO
El único material necesario es el Escondibot, fotocopias con los textos y algún adhesivo para colgarlos en la pared. No se requiere ningún espacio especial.
Para construir el Escondibot se requiere una caja de cualquier material, cinco leds (preferiblemente cuatro verdes y uno rojo), un sensor de proximidad, una placa de Arduino UNO, una breadboard, cables y regletas para empalmarlos.
El primer paso para construir el Escondibot es hacer el circuito y el código que después se utilizará en Arduino, para lo cual se recomienda utilizar Tinkercad. El circuito debe ser el siguiente, recordando que el color de los cables solo se ofrece para guiar el montaje:
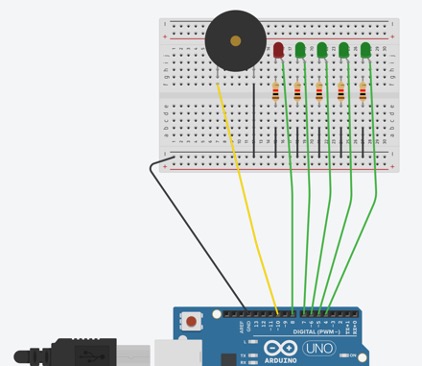
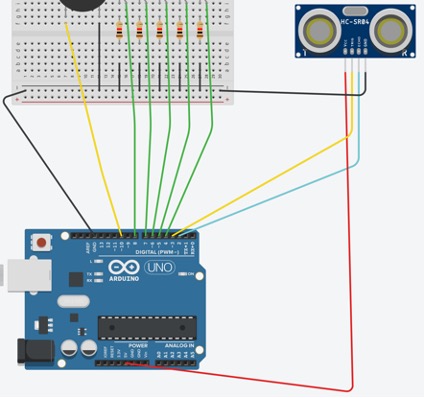
Figura 3
- Utilizando una placa de Arduino UNO y una placa de inserción de tipo bredboard, enlazamos cada uno de los leds a sendas resistencias conectadas al pin GND (tierra) de la placa de Arduino (ver cables negros de la Imagen 2). Conectamos la segunda patilla de cada led a un pin digital de la placa (ver cables verdes de la Imagen 2).
- Conectamos una de las patillas del zumbador (o buzzer) a la línea de tierra de la bredboard (cable negro) y la otra patilla a un pin digital de la placa de Arduino (cable amarillo de la Imagen 2).
- Conectamos la patilla GND del sensor de proximidad a la línea de toma tierra de la bredboard (cable negro de la Imagen 3) y la patilla VCC (corriente alterna) al pin de 5V de la placa Arduino (cable rojo de la Imagen 3). Conectamos las otras dos patillas a sendos pines digitales de la placa Arduino (cables celeste y amarillo).
- Elaboramos el código de Arduino en el programa Tinkercad, asegurándonos de los siguientes requisitos:
- Debemos establecer un pin de entrada y uno de salida para el sensor de proximidad.
- Hay que programar los leds y el zumbador de manera que haya una latencia (delay)entre la activación de cada uno. De esta manera, la activación de cada led marcará el transcurso de 10 segundos (o tantos segundos como queramos) y el pitido del zumbador indicará que se ha acabado el tiempo.
- Debemos indicar que los leds comiencen a encenderse cuando el sensor de proximidad detecte algo (así el Escondibot comenzará a «contar» cuando se le tapen los «ojos»).
- Si se desconoce cómo generar el código, podemos encontrarlo en la biblioteca de Arduino o buscar las instrucciones en los tutoriales del propio Tinkercad.
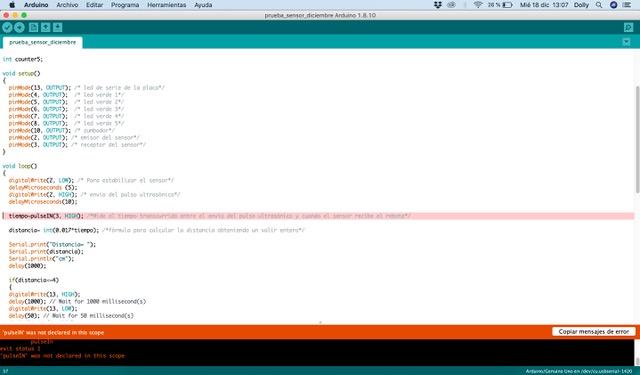
- Una vez tenemos el circuito virtual funcionando en Tinkercad, pasamos el código a Arduino y probamos nuestro circuito físico. De haber algún error, Arduino nos los señalará (por ejemplo, en la Imagen 4 vemos que la palabra «IN» da error porque la hemos puesto en mayúsculas y debería estar en minúsculas).
- Utilizando regletas de cables, realizamos el circuito sacando los leds de la breadboard y conectándolos a ella mediante un cable largo. De esta manera, podremos encajar los leds a modo de pelos del Escondibot.
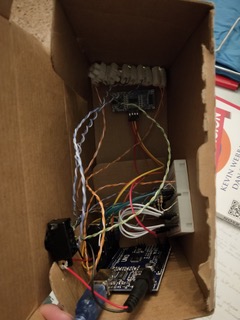
- Introducimos el circuito en la caja de chapa o cartón que nos sirva de cuerpo del Escondibot, extrayendo los leds (a modo de pelo), el sensor de proximidad (a modo de ojos) y el interruptor de la placa de Arduino. Fijamos una solapa de cartón o chapa encima del sensor de proximidad para poder cubrirlo (recuerda que el Escondibot comenzará a marcar el tiempo cuando se le cierren los «ojos», es decir, cuando se cubra el sensor de proximidad).
- Por último, si quieres, pinta al Escondibot para que sea aún más simpático. Si te ha quedado alguna duda, puedes consultar el proceso completo en este vídeo. ¡Anímate a construir tu Escondibot!

ANÁLISIS DE LA ACTIVIDAD
Atendiendo a la definición de Werbach y Hunter (2014), la actividad planteada se presenta como una práctica de gamificación, en tanto que integra elementos de los juegos en un contexto que, claramente, no es un juego. Siguiendo a estos mismo autores, para que una experiencia gamificada resulte exitosa, se debe medir la dificultad del juego que se plantea, para que no resulte ni aburrido –por ser demasiado fácil– ni frustrante –por ser demasiado difícil–. En este sentido, al haber escogido un juego tradicional al que casi todos los alumnos habrán jugado en su infancia, se ha conseguido que la actividad sea técnicamente fácil. Es, pues, el contenido del texto a copiar el que otorga ese punto extra de dificultad necesario para que lo afronten como un reto, propiciando así la aparición de uno de los requisitos indispensables para gamificar con éxito: la motivación intrínseca, aquella que radica en la propia actividad (Werbach y Hunter, 2014).
Por su parte, el hecho de introducir el Escondibot proporciona otro tipo de motivación, la extrínseca, puesto que introduce el factor de competición: el Escondibot indica cuándo empezar y cuándo parar, propiciando así que la actividad sea una carrera. Tal y como Werbach y Hunter indican, la motivación extrínseca se torna poco efectiva a largo plazo, por lo que no podría basarse toda la actividad en ello. No obstante, en este caso se considera positiva puesto que está combinada con la motivación intrínseca, como ya hemos visto, y dado que aporta una dosis inmediata de adrenalina a los alumnos.
Asimismo, si son los propios alumnos los encargados de construir el Escondibot, la experiencia educativa se torna mucho más significativa. Tal afirmación queda constatada por la teoría construccionista de Papert, puesto que diseñar el prototipo mecatrónico potenciará el nivel de implicación del alumnado al acompañar la experiencia didáctica de «algo real en el mundo« (Papert, 2003).
Por tanto, la experiencia educativa presentada en estas líneas constituye una meditada combinación de la tecnología maker y la gamificación atendiendo a la motivación del alumnado y basándose en teorías educativas que han demostrado su utilidad en las últimas décadas. El hecho de combinar todo ello en una asignatura «de letras» y aplicarlo a una actividad puramente lingüística es una pequeña muestra de que las nuevas tecnologías también deben ser integradas en aquellas asignaturas que no forman parte del STEM, puesto que constituyen un gran aliado para fomentar la motivación y participación del alumnado.
BIBLIOGRAFÍA Y REFERENCIAS
- Hom, Helaine J. (11 de febrero de 2014). What is STEM Education? Recuperado de https://www.livescience.com/43296-what-is-stem-education.html
- Papert, Seymour (2003). La máquina de los niños: replantearse la educación en la era de los ordenadores. (Trad: S. Balari). Barcelona: Paidos Ibérica. (Obra original publicada en 1993).
- Werbach, Kevin y Hunter, Dan (2014). Gamificación. Revoluciona tu negocio con las técnicas de los juegos. (Trad. Vuelapluma S.L.). Madrid: Pearson Educación. Obra original publicada en 2012).
FIGURAS
- Figura 1. Autora: Dolly Britton Jiménez, 3 de enero de 2020 – Prototipo mecatrónico al que hemos llamado «Escondibot» – Imagen propia.
- Figura 2. Autora: Dolly Britton Jiménez, 1 de enero de 2020 – Circuito de leds y zumbador en Tinkercad- Imagen propia.
- Figura 3. Autora: Dolly Britton Jiménez, 1 de enero de 2020 – Circuito anterior incluyendo ahora el sensor de proximidad – Imagen propia.
- Figura 4. Autora: Dolly Britton Jiménez, 1 de enero de 2020 – Código de Arduino utilizado. En rojo, el error indicado – Imagen propia.
- Figura 5. Autora: Dolly Britton Jiménez, 1 de enero de 2020 – Circuito con componentes físicos introducido en la caja/cuerpo del Escondibot – Imagen propia.
- Figura 6. Autora: Dolly Britton Jiménez, 1 de enero de 2020 – Sensor de proximidad como ojos del Escondibot – Imagen propia.
- Figura 7. Autora: Dolly Britton Jiménez, 1 de enero de 2020 – Leds de señalización del transcurso del tiempo como pelos del Escondibot – Imagen propia.
Dolly Britton Jiménez